Investigation of Area- and Path-Planning Algorithms using Panel-Method-Based Guidance
A research project conducted at TUM’s Institute for Rotorcraft and Vertical Flight, integrating classical robot path-planning algorithms with aerodynamics-inspired Panel-Method-Based guidance to generate smooth, collision-free trajectories for UAVs in urban environments. The panel method, rooted in potential flow theory, treats obstacles as vortex panels to produce a continuous velocity field: eliminating the local-minima problem of classical potential fields. The system was demonstrated in a search-and-rescue scenario: an area-coverage UAV first locates a distress signal using grid-based sweeping guided by the panel method, then a second UAV navigates to the target using a classical path-planning algorithm.
My Contributions
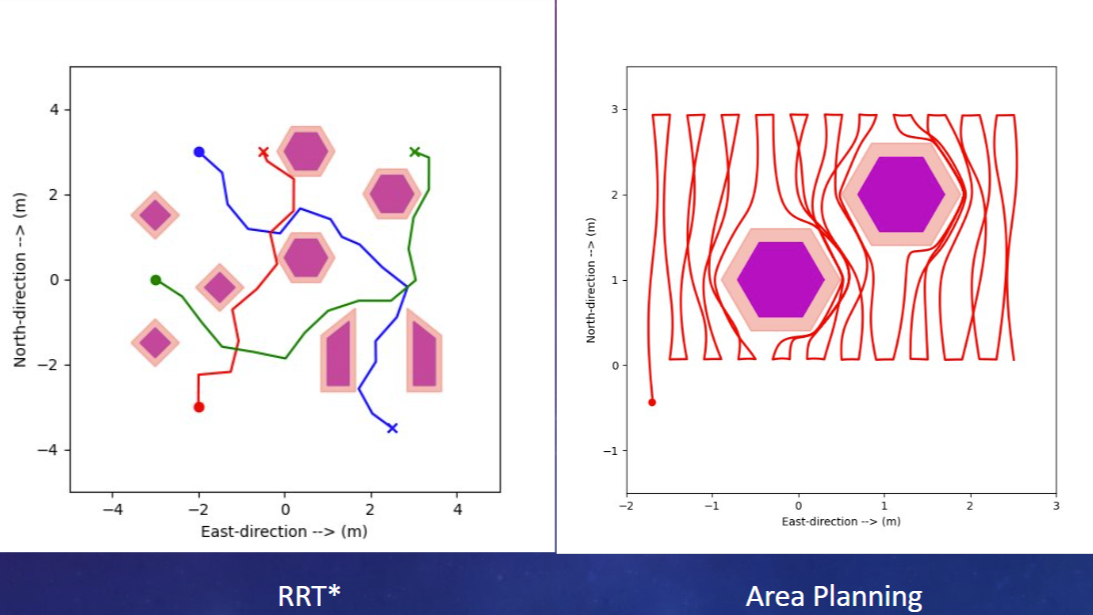
- Area-Coverage Algorithm: Implemented the grid-based area-coverage planner that divides an arena among multiple vehicles, generates boustrophedon (back-and-forth) sweep paths, and hands off each waypoint sequence to the panel-method trajectory planner for collision-free execution.
- Panel Method Integration: Integrated the panel-method guidance environment into the area-planning pipeline, enabling real-time obstacle circumnavigation by computing vortex-panel strengths and deriving velocity fields that steer vehicles around buildings.
- Building Inflation & Border Enclosure: Developed pre-processing steps to inflate obstacle polygons (safety margins) and generate enclosing borders around the arena, ensuring the coverage and guidance algorithms operate within valid, collision-safe bounds.
- Distress Signal Triangulation: Contributed to the triangulation module that estimates the location of a missing person from signal-strength measurements collected during the area sweep, triggering the handoff to the path-planning UAV.
- Multi-Vehicle Coordination: Extended the area planner to support multiple simultaneous vehicles, automatically partitioning the arena and assigning sub-regions, with the panel method handling inter-vehicle collision avoidance.