Projects

Subterranean Sentinel: Autonomous MAV in Challenging GNSS-Denied 3D Environments
Fully autonomous drone that explores unknown underground caves, detects semantic targets, and returns safely. Built on ROS 2 with RRT* planning, OctoMap mapping, and a mission FSM.

Autonomous Parking: Parallel & Reverse in an Unknown Environment
ROS 2 package for autonomous parallel and reverse parking on a real car, combining SLAM, EKF localization, custom Nav2 path planners, and automated parking space detection.
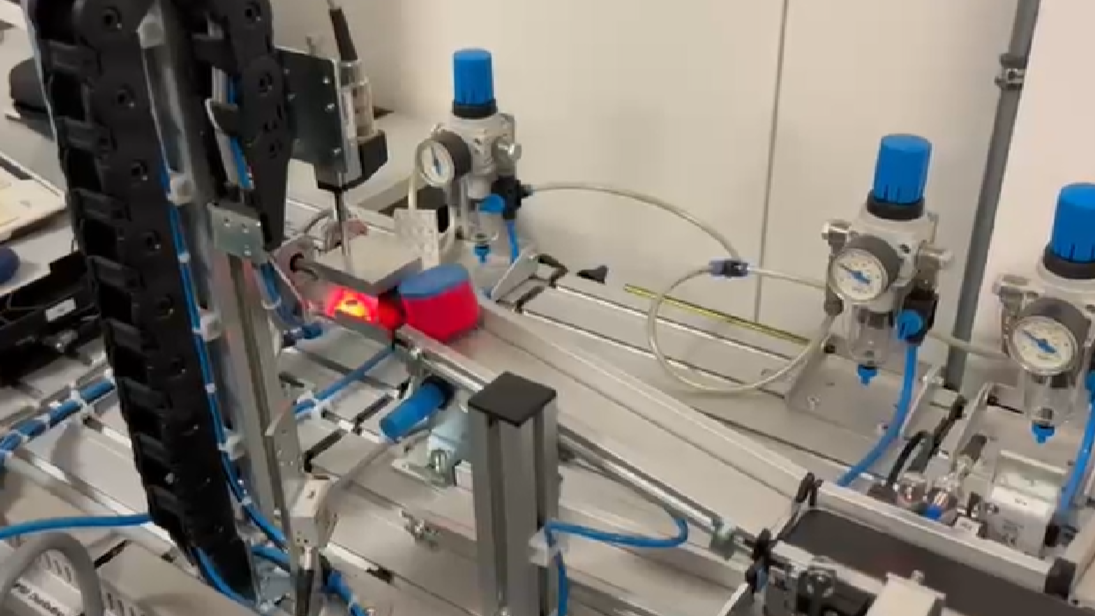
Intelligent Distributed Embedded Systems in Mechatronics
Petri net modeling, Simulink/Stateflow control design, CoDeSys PLC programming, and model-driven engineering with Acceleo M2T transformations applied to a Festo sorting station.
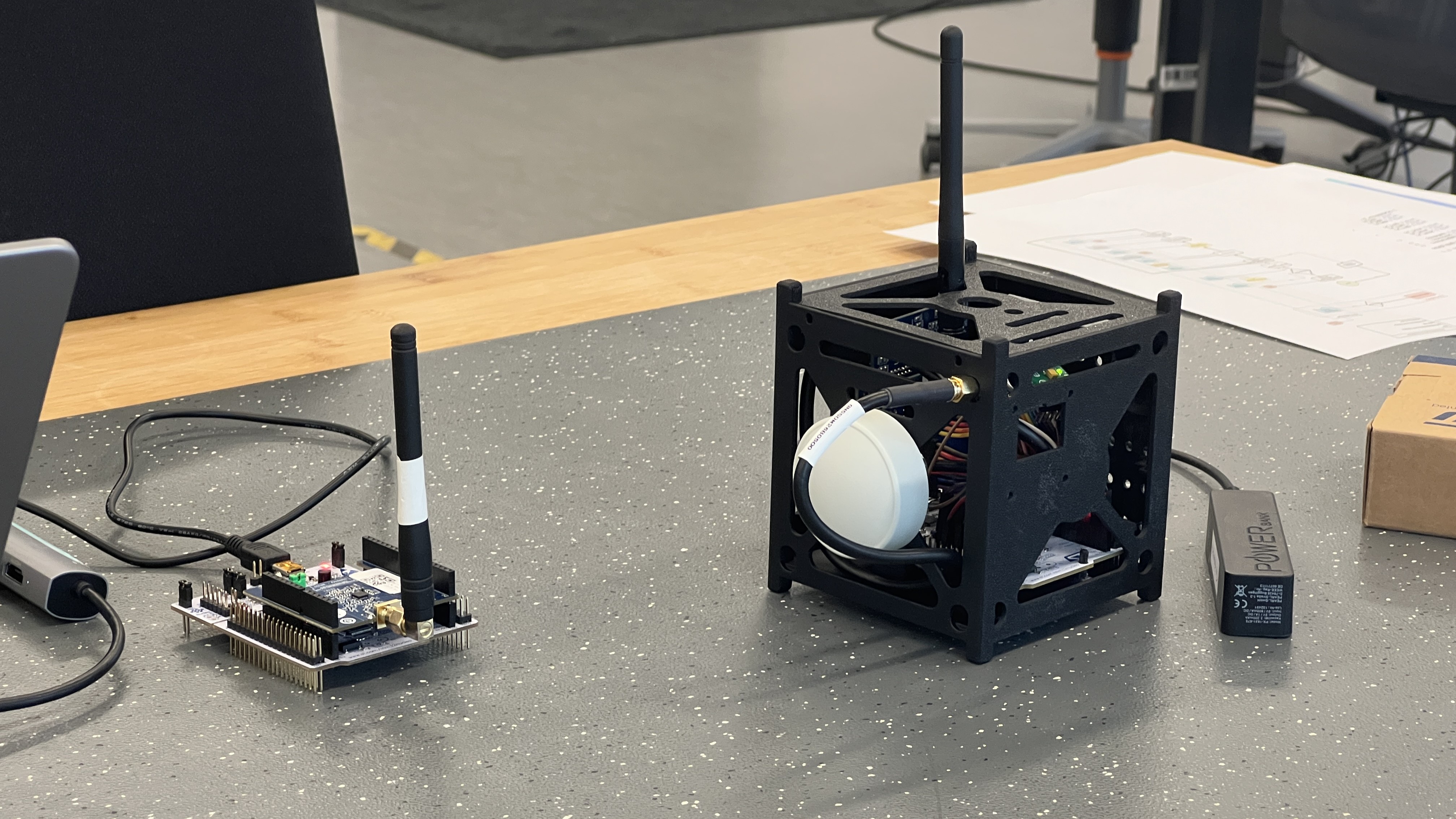
1U CubeSat Design, Build & Flight Software
Full design, assembly, and flight software for a 1U CubeSat, including CCSDS telemetry over S2LP Sub-GHz radio, flight-phase FSM, GNSS, MEMS sensors, and 3D CAD on STM32.
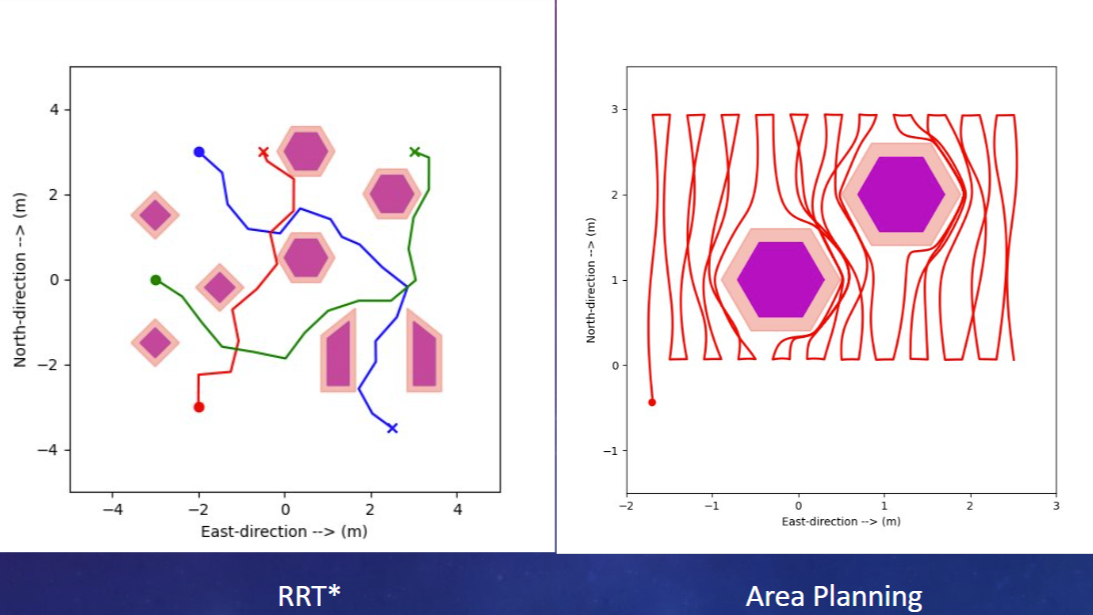
Investigation of Area- and Path-Planning Algorithms using Panel-Method-Based Guidance
Integrated grid-based area-coverage and path-planning algorithms (A*, RRT*, Dijkstra) with aerodynamics-inspired panel-method guidance to generate smooth, collision-free UAV trajectories for urban search-and-rescue scenarios.
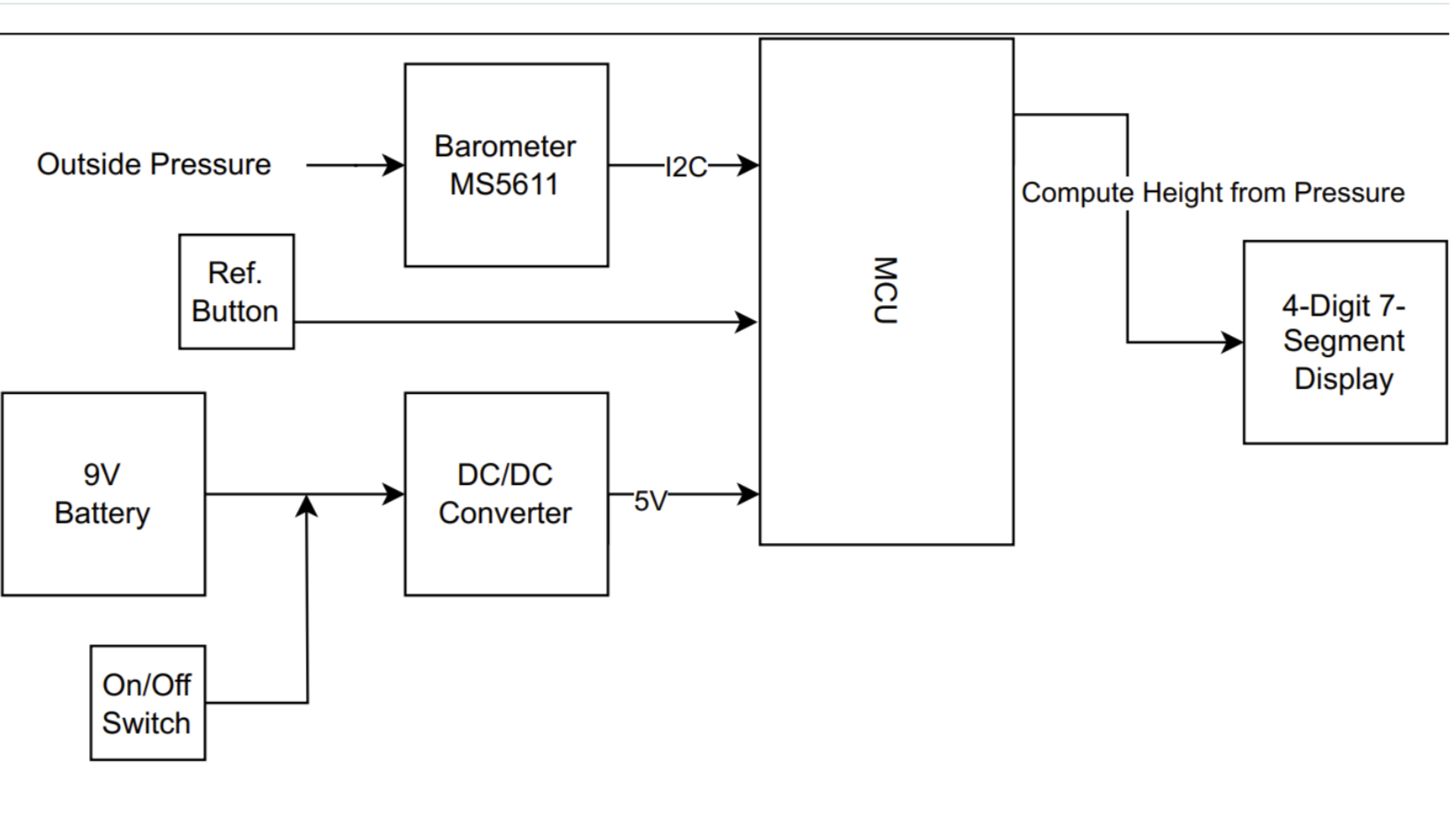
Embedded Barometric Altimeter with Kalman Filtering
Barometer-based altimeter for the Spacecraft Electronics lab at TUM, using an MS5611 sensor over I2C with moving average and Kalman filtering, displayed on a TM1637 7-segment display.
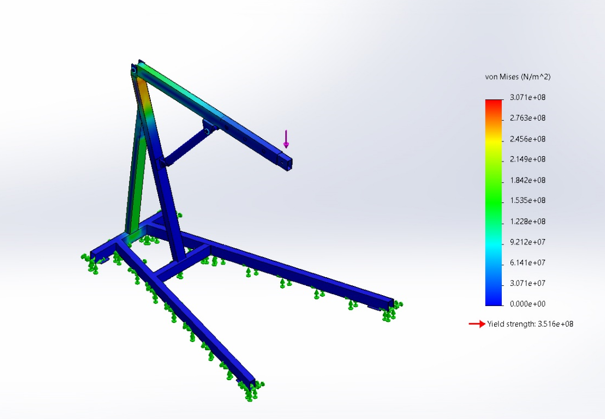
Retractable Shop Crane Project
Designed a re-sizable crane that can hold (500-2000) Kg of weight.
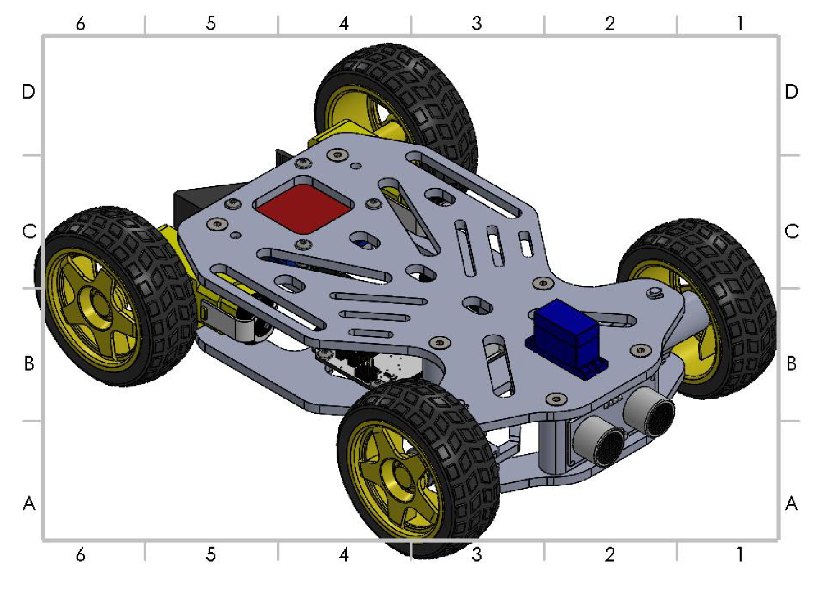
Hand Gesture Controlled Ackerman Steering Car using ATMega328p
Captured hand’s yaw and tilt angles using MPU6050 through I2C, and data was sent wirelessly using RF transmission.
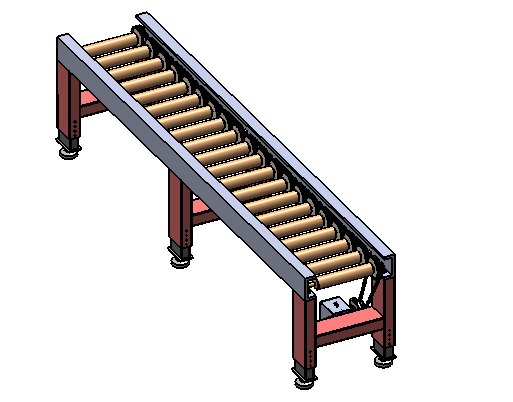
Chain-Roller Conveyor
Created a chain roller conveyor to drive 20 boxes of products each 50Kg for 6m long.
The Conqueror: A single player turn-based empire building game.
Led a team of 3 students and incorporated principles of OOP into a java programmed game.