Embedded Barometric Altimeter with Kalman Filtering
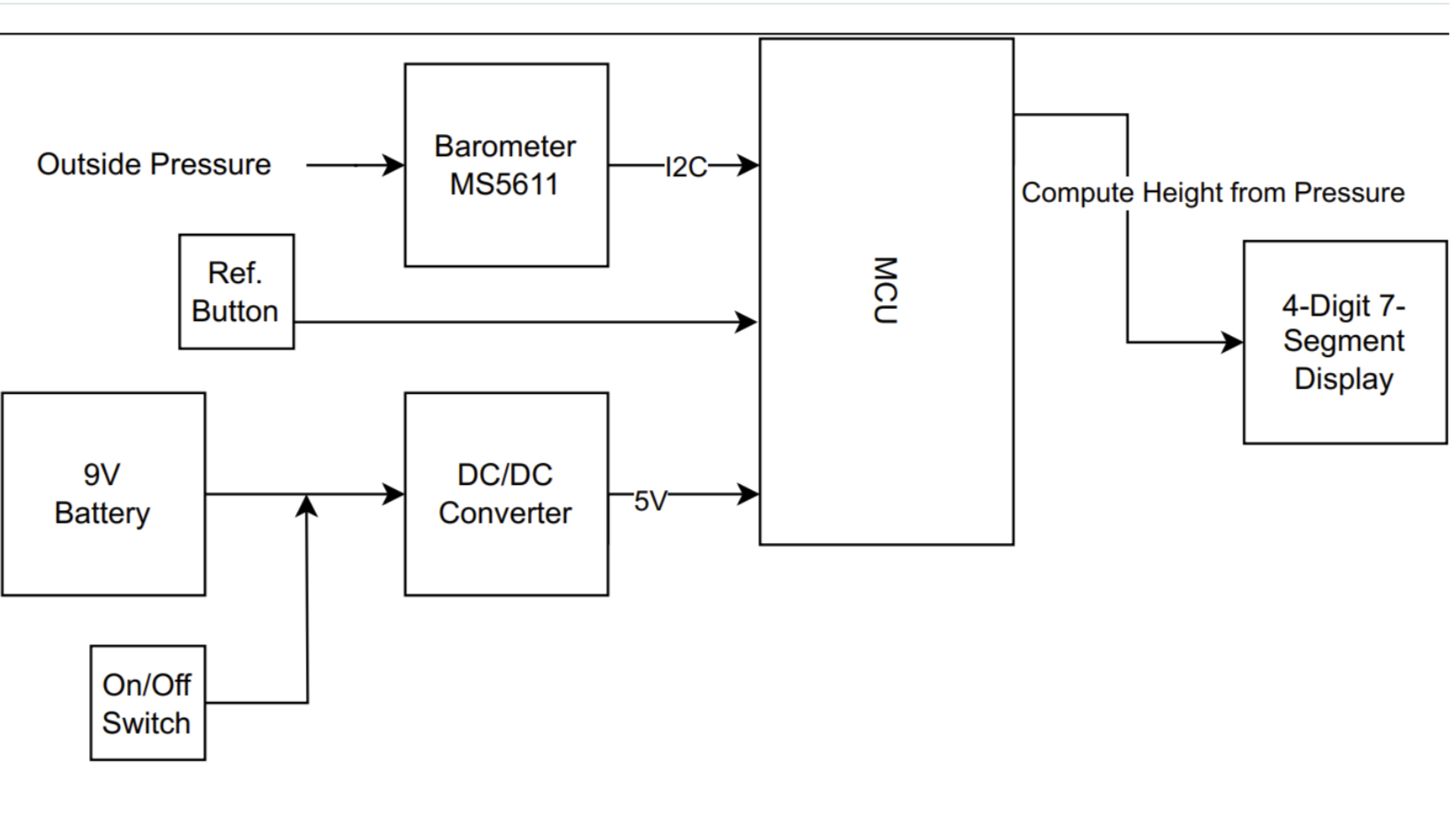
A barometer-based altimeter system built for the Spacecraft Electronics practical lab course at TUM Chair of Spacecraft Systems. The system reads atmospheric pressure and temperature from an MS5611 sensor over I2C, converts them to altitude using the Hypsometric and Barometric formulas, and displays the result on a TM1637 seven-segment display. Digital filtering (moving average and 1D Kalman filter) is applied to reduce sensor noise and stabilize altitude estimates.
My Contributions
- Altitude Computation: Implemented both the Hypsometric and Barometric formula models to derive altitude from raw pressure and temperature readings, with full temperature compensation.
- Digital Filtering Pipeline: Developed the moving average filter for pressure smoothing and the 1D Kalman filter for altitude stabilization, tuning process and measurement noise parameters for optimal response.
- MS5611 Driver: Implemented I2C communication with the MS5611 barometric sensor, including sensor reset, PROM calibration coefficient readout, and compensated pressure/temperature conversion.
- TM1637 Display Driver: Interfaced the TM1637 7-segment LED driver over its 4-wire serial protocol to display real-time altitude readings.
- Validation Testing: Performed accuracy, sensitivity, temperature compensation, response time, altitude simulation, long-term stability, power supply variation, vibration, and I2C communication tests to verify system performance.