Hand Gesture Controlled Ackerman Steering Car
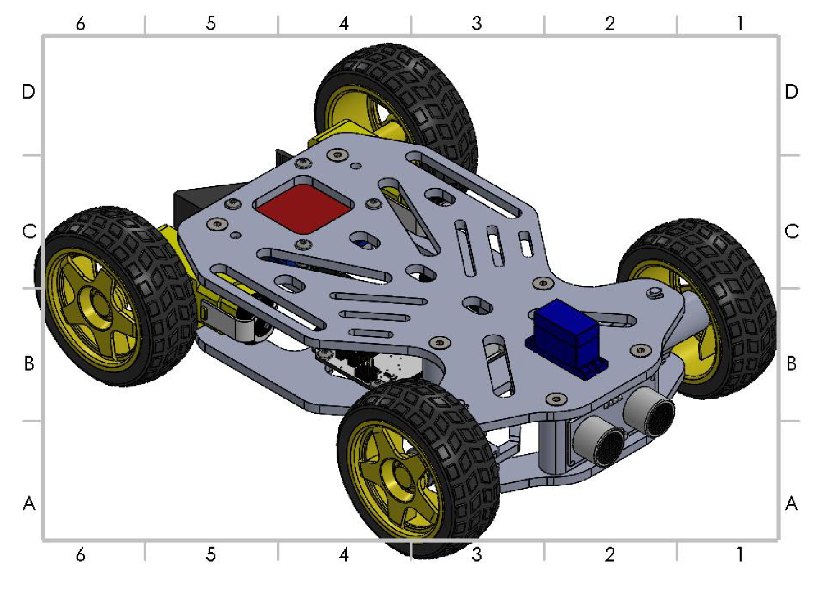
This project implements an Ackermann-steering RC car controlled entirely by hand gestures.
Using an MPU6050 IMU, we captured the hand’s yaw and tilt angles over I2C on an ATmega328p microcontroller. These angles are processed to generate steering and throttle commands, which are transmitted wirelessly over RF to the car.
On the vehicle side, the microcontroller decodes the RF packets and drives the steering servo and DC motor driver to follow the commanded trajectory.
Key aspects:
- Gesture-to-command mapping for smooth steering and acceleration
- Real‑time I2C sensor reading and filtering on an ATmega328p
- Simple, low‑latency RF communication link between controller and car
The full source code and hardware details are available in the demo link on the main Projects page.